
Monopulse Antennae
Created | Updated Dec 23, 2008
The History of Radar | Radar History: Isle of Wight Radar During The Second World War | Radar: The Basic Principle
Radar Technology: Main Components | Radar Technology: Side Lobe Suppression |
Radar Technology: Airborne Collision Avoidance
Radar Technology: Antennas | Radar Technology: Antenna Beam Shapes | Radar Technology: Monopulse Antennas | Radar Technology: Phased Array Antennas | Radar Technology: Continuous Wave Radar | Theoretical Basics: The Radar Equation
Theoretical Basics: Ambiguous Measurements | Theoretical Basics: Signals and Range Resolution
Theoretical Basics: Ambiguity And The Influence of PRFs | Theoretical Basics: Signal Processing | Civilian Radars: Police Radar | Civilian Radars: Automotive Radar | Civilian Radars: Primary and Secondary Radar
Civilian Radars: Synthetic Aperture Radar (SAR) | Military Applications: Overview | Military Radars: Over The Horizon (OTH) Radar
How a Bat's Sensor Works | Low Probability of Intercept (LPI) Radar | Electronic Combat: Overview | Electronic Combat in Wildlife
Radar Countermeasures: Range Gate Pull-Off | Radar Countermeasures: Inverse Gain Jamming | Advanced Electronic Countermeasures
The conventional way of enhancing angular accuracy is to take several measurements while the antenna rotates through an area of interest, and then to compare the results. However, this method has its drawbacks even if the antenna is properly calibrated. As the measurements are taken one after the other, the target has moved to another place in-between and the aspect angle has changed too. This change of aspect angle can lead to significant variation in the strength of the echo signal (this is called fluctuation) and render a comparison of consecutive measurements utterly useless.
The monopulse technique was invented to eliminate this source of measurement error. A monopulse antenna also takes several measurements with beams pointing into different directions, but as the name implies, these measurements are taken simultaneously, with a single pulse. Therefore this technique can determine angle very precisely.
The Trick
The trick is based on one of the underlying ideas of high frequency applications: if your device is not precise enough then you can minimise the error by applying it twice (or using two of them) and seeing what the difference is.
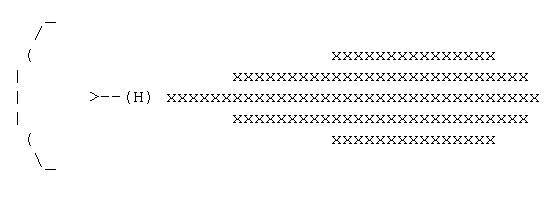
Here the original device is a reflector antenna fed by a horn. The device and its main lobe is shown below. If a target is somewhere around boresight then its echo strength does not vary significantly and the antenna needs to sweep about half its beamwidth to the left and to the right in order to sense a reasonable difference.
Now a second feed horn is added. Both of them are displaced off the focal point which is a slight drawback. The beams created by horns A and B are somewhat wider than the beam of horn H above and point at slightly different directions.
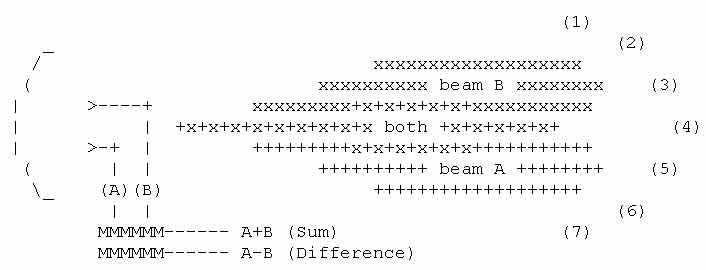
But this is only if you look at them individually. Having two beams means that you can play with the signals that they receive. For example, you can add and subtract them, which is done in the black box above. If a target moves through the scene, passing the points (1) to (7), the following happens:
- At point (1), none of the beams receive an echo
- Reception from beam B increases, reaches its maximum in (3) and starts to fall off, reaching zero at point (6)
- Reception from beam A begins at point (2), reaches its maximum at (5) and begins to fall off
The difference output is obtained by taking the A values and subtracting the B values. It starts at zero in (1) and receives major contributions from A in (2). Moving from (3) to (4), the contribution from A gets weaker because a growing value from B is subtracted. Therefore, the difference output is zero in point (4) when both inputs are equal. Moving on to (5) and (6), the positive input from A vanishes while the negative input from B reaches its peak. At (7), both inputs are zero and so is their difference.
The results for the sum (S) and difference (D) output are plotted below:

So What?
The sum output has replaced the former single beam from horn H and in comparison, it's worse. But the difference output provides a means of actually pinpointing a target. If the target is somewhere near boresight then looking at the difference output literally tells the difference whether the antenna is pointed a bit to the left, precisely on spot or somewhat to the right. Doing some further maths by dividing the difference output by the sum output yields precise numeric values for a target's offset from boresight.
Thus, the measurement accuracy can be improved tenfold or better. And all this without increasing the antenna size. On top of that, a single pulse is enough.
However, there is a drawback: practical monopulse antennae require four feed horns in order to use the feature in both the horizontal and vertical axis and three individual receiver chains, one for the sum output and two for the difference outputs in the horizontal and vertical planes.
Monopulse antennae are in widespread use in military applications like target-tracking radars and missile-seeker heads. Civilian applications include automotive radars, secondary radars for air traffic control and control systems which need to know the precise whereabouts of a TV-, GPS- or other type of satellite.
History: Overview | Isle of Wight Radar During WWII
Technology: Basic Principle | Main Components | Signal Processing | Antennae | Side Lobe Suppression | Phased Array Antennae | Antenna Beam Shapes | Monopulse Antennae | Continuous Wave Radar
Theoretical Basics: The Radar Equation | Ambiguous Measurements | Signals and Range Resolution | Ambiguity and PRFs
Civilian Applications: Police Radar | Automotive Radar | Primary and Secondary Radar | Airborne Collision Avoidance | Synthetic Aperture Radar
Military Applications: Overview | Over The Horizon | Low Probability of Intercept | How a Bat's Sensor Works
Electronic Combat: Overview | Electronic Combat in Wildlife | Range Gate Pull-Off | Inverse Gain Jamming | Advanced ECM | How Stealth Works | Stealth Aircraft